
Project Description
Main Project Image
The project owner hasn't added main project image yet.
Project description
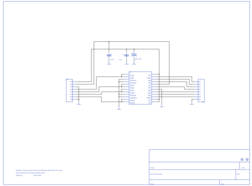
The TB6612FNG motor driver can control up to two DC motors at a constant current of 1.2A (3.2A peak). Two input signals (IN1 and IN2) can be used to control the motor in one of four function modes - CW, CCW, short-brake, and stop. The two motor outputs (A and B) can be separately controlled, the speed of each motor is controlled via a PWM input signal with a frequency up to 100kHz. The STBY pin should be pulled high to take the motor out of standby mode.
Logic supply voltage (VCC) can be in the range of 2.7-5.5VDC, while the motor supply (VM) is limited to a maximum voltage of 15VDC. The output current is rated up to 1.2A per channel (or up to 3.2A for a short, single pulse).
Board comes with all components installed as shown. Decoupling capacitors are included on both supply lines. All pins of the TB6612FNG are broken out to two 0.1" pitch headers; the pins are arranged such that input pins are on one side and output pins are on the other.
Project description, more information and ordering can be found at https://www.sparkfun.com/products/9457
TB6612FNG Datasheet: http://www.sparkfun.com/datasheets/Robotics/TB6612FNG.pdf
bildr Tutorial: http://bildr.org/2012/04/tb6612fng-arduino/
Gallery
The project owner hasn't added any images yet.
Design Files
Embed Code
Component (9)
Qty
Description
SparkFun:M08:LONGPADS
JP1, JP2
2
SparkFun:M08:LONGPADS
SparkFun:GND:
GND1, GND4, GND6, GND7, GND5, GND2, GND3
7
SparkFun:GND:
SparkFun:CAP_POL:3528
C3
1
SparkFun:CAP_POL:3528
SparkFun:CREATIVE_COMMONS:
U$1
1
SparkFun:CREATIVE_COMMONS: